Appearance
Connection Settings
KH Control connects to a MAVLink stream for sending commands and receiving status information. The following connection types are supported:
- Web Sockets
- IP/TCP
- IP/UDP
TIP
KH Control does not support direct connection over a COM port, but you can connect via a GCS such as Mission Planner. See Connecting to Mission Planner.
To establish a connection navigate to the connections tab in the sidebar by clicking on this symbol:

Within this tab you can both manage and initiate/sever connections. To make your first connection you must:
- Add a connection to the connections table.
- initiate the connection from the table.
You will now be shown how to do both steps:
Adding a Connection
On the first time you enter the Connections tab, or when you click the Add button below the table, you will be greeted with a form to add your connection details:
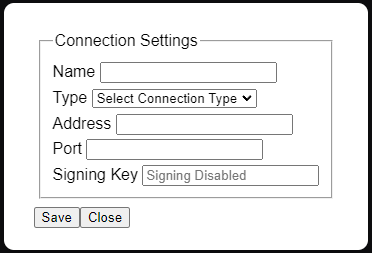
Complete the details as necessary and click "Save" to add the connection to the connections table. More information on the form fields is given below:
| Field | Explanation |
|---|---|
| Name | The name that you want to give the connection so that you can easily find it again in the connections table. |
| Type | The type of connection that the MAVLink stream will be on. |
| Address | The IP address for the MAVLink stream e.g. 127.0.0.1. |
| Port | The port number for the MAVLink stream e.g. 5761. |
| Signing Key | If MAVLink signing is being used add your secret key in this field. |
Once you have added your connection to the table you can move on to the next step.
Initiating a Connection
Once your connection details have been saved they will appear in the connections table like so:
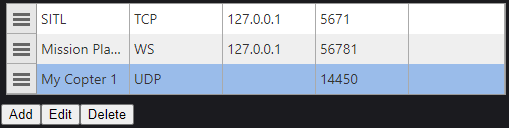
To initiate a connection to a MAVLink stream, select a connection by clicking on that row in the table. Then click Connect at the top of the page. The connections tab will now change to have a green tick to signify that a connection has been selected:

Managing Connections
The connections table allows you to edit, delete, and reorder the connections.
To edit or delete a connection, select it in the table by clicking on it and then click on the respective Edit or Delete buttons.
To move a connection click and hold the three bar symbol to the left of the table. You can then drag and drop the connection to the new location in the table.
TIP
You must be disconnected to be able to edit the connections table.
Connecting to Mission Planner
Most readily available GCS software allows you to mirror the MAVLink stream over an IP connection. This is very easy to do with Mission Planner for example:
- Connect the vehicle to Mission Planner as normal using any connection type:
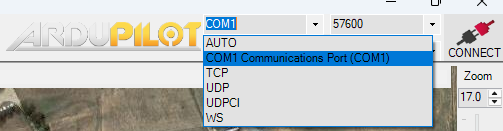
- Mission Planner automatically forwards the MAVLink stream to this WebSocket:
127.0.0.1:56781. Add these details to a connection as per the Adding a Connection instructions, hit connect and you have both Mission Planner and KH Control connected to the same MAVLink network.
TIP
Only the first instance of Mission Planner will automatically host a WebSocket. KH Control may fail to connect if there a multiple instance if Mission Planner running.
If you do need to run multiple Mission Planner instances you can forward to KH Control using TCP/UDP.
Next Steps
The final step in setting up KH Control is to make sure your MAVLink Settings are configured correctly.